Implementation of Fuzzy Logic as Steering Control on Hardware In the Loop Autonomous Electric Car
DOI:
https://doi.org/10.33019/jurnalecotipe.v8i1.2121Keywords:
Fuzzy Logic, Autonomous Electric Vehicle, Hardware in the Loop, Ultrasonic, Object DetectionAbstract
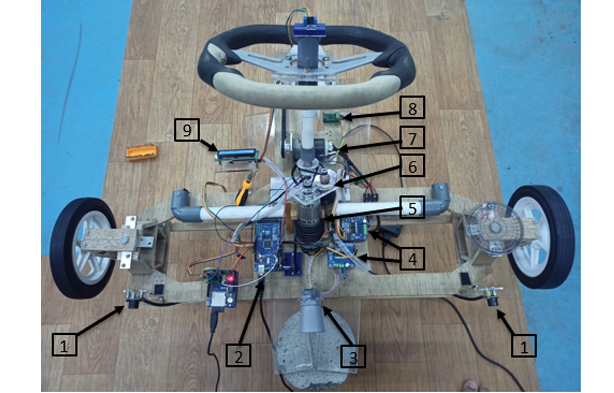
A car is a necessity and a means of transportation that makes it easy to travel. Many types and products of cars have been developed now, one of which is electric cars because fossil fuels have started to deplete in availability. The next development is an autonomous electric car. However, autonomous control systems such as steering and speed control are complex and difficult tasks that require optimal, precise, and robust control systems. Therefore, in this paper, a control system using the fuzzy logic method is developed by utilizing input from the Ultrasonic sensor. This sensor is capable of detecting objects with the farthest distance of 10 meters and crunching 0.3 meters. The output of this control system is the degree of rotation of the steer on the Hardware In The Loop which can turn to avoid the object being detected. Based on this system test, the accuracy of the degree of rotation of the steer is 5 ° and the maximum rotation is 30 °, while the top speed of the rear wheels is 15 km / h. The steering system on the Hardware In The Loop has pretty good accuracy to improve smoothness when turning.
Downloads
References
N. D. Van and G. Kim, “Fuzzy Logic and Deep Steering Control based Recommendation System for Self-Driving Car,” 2018 18th Int. Conf. Control. Autom. Syst., no. Iccas, pp. 1107–1110, 2018.
B. Dadang Pribadi, H. Widyantara, and Harianto, “Pengendalian Motor DC Brushless Dengan PID pada Robot Penghindar Halangan (Obstacle Avoidance Robot),” Jcones, vol. 3, no. 1, pp. 61–69, 2014.
N. Yang and Q. Liao, “Design and simulation for steer-by-wire system based on fuzzy-PID,” in Proceedings - 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics, IHMSC 2015, 2015, vol. 1, pp. 291–294.
Y. Wu, D. Song, Z. Hou, and X. Yuan, “A fuzzy control method to improve vehicle yaw stability based on integrated yaw moment control and active front steering,” Proc. 2007 IEEE Int. Conf. Mechatronics Autom. ICMA 2007, vol. 2, pp. 1508–1512, 2007.
G. Zhanfeng, W. Wenjiang, Z. Jianhua, and S. Zhanpeng, “Electric power steering system based on fuzzy PID control,” ICEMI 2009 - Proc. 9th Int. Conf. Electron. Meas. Instruments, pp. 3456–3459, 2009.
M. Restu and S. Bakhri, “Perbandingan Sistem Pengontrolan PID Konvensional dengan Pengontrolan CMAC , Fuzzy Logic dan ANN Pada Water Level Pressurizer,” vol. 17, no. 3, pp. 129–141, 2013.
N. Allu, R. S. Sadjad, and F. A. Samman, “Pengendalian Kecepatan Motor Arus Searah Terkendali Jangkar dengan Pengendali PID Tertala Berbasis Perhitungan Nilai Akar Kuadrat Rata-rata,” 2017. [Online]. Available: https://id.scribd.com/document/337750476/Jurnal-Tesis-motor-Dc.
L. Ibarra and C. Webb, “Advantages of Fuzzy Control While Dealing with Complex/ Unknown Model Dynamics: A Quadcopter Example,” in New Applications of Artificial Intelligence, 2016, pp. 93–121.
P. Albertos, A. Sala, and M. Olivares, “Fuzzy Logic Controllers. Methodology, Advantages and Drawbacks,” no. September, 2000.
C. Yuan, L. Chen, S. Wang, and H. Jiang, “Μ Control of Vehicle Active Suspension and Electric Power Steering System,” 2010 Chinese Control Decis. Conf. CCDC 2010, no. m, pp. 45–49, 2010.
K. R. S. Kodagoda, W. S. Wijesoma, and E. K. Teoh, “Fuzzy speed and steering control of an AGV,” IEEE Trans. Control Syst. Technol., vol. 10, no. 1, pp. 112–120, 2002.
J. George and T. J. Klir, Fuzzy Set Theory: Foundation and Application. New York: Prentice-Hall PTR, 1997.
B. Baasandorj, A. Reyaz, P. J. Ho, C. W. Cheol, D. J. Lee, and K. T. Chong, “A mobile robot obstacle avoidance using fuzzy logic and model predictive control,” Appl. Mech. Mater., vol. 548–549, pp. 922–927, 2014.
Downloads
Published
Issue
Section
License
Copyright in each article is the property of the author.
- The author acknowledges that the Jurnal Ecotipe (Electronic, Control, Telecommunication, Information, and Power Engineering) has the right to publish for the first time with a Creative Commons Attribution 4.0 International License.
- The author can enter the writing separately, regulate the non-exculsive distribution of manuscripts that have been published in this journal into other versions (for example: sent to the author's institution respository, publication into books, etc.), by acknowledging that the manuscript was first published in the Jurnal Ecotipe (Electronic, Control, Telecommunication, Information, and Power Engineering);